MODELAGEM E OTIMIZAÇĂO DO PROTÓTIPO MINI-BAJA UTILIZANDO MULTI-CORPOS E SUPERFÍCIES DE RESPOSTA.
Engş M.F. Leal, M.A.M. Brito, Prof. Dr. J.A.F. Borges
Faculdade de Engenharia Mecânica, Universidade Federal de Uberlândia, Av. Universitária s/nş., Campus Santa Mônica, Bloco 1M, Uberlândia-MG, cep: 38400-902.
Palavras-chaves: CAD, CAE, Modelagem, Otimizaçăo, Multi-corpos.
RESUMO:
Neste trabalho foi realizado um estudo do comportamento dinâmico de um veículo com estrutura tubular para uso fora de estrada do tipo Mini-Baja. Para efeito desta análise foi utilizado o software comercial ADAMS e algoritmos de otimizaçăo seqüencial. Foram comparados resultados de otimizaçăo obtidos através de um modelo matemático refinado desenvolvido no próprio ADAMS e de um meta-modelo estatístico, obtido pela técnica das superfícies de resposta.
As etapas de desenvolvimento do trabalho foram:
· Obtençăo de um meta-modelo estatístico (superfície de resposta) que represente de forma suficientemente precisa o comportamento dinâmico do veículo em estudo para efeito de otimizaçăo;
· Comparaçăo dos resultados obtidos pela otimizaçăo usando o meta-modelo estatístico de superfície de resposta e o modelo matemático de multi-corpos;
Para a modelagem, partiu-se do desenho 3D do protótipo construído no programa de CAD Mechanical Desktop. Foi obtido um modelo de linhas que representava de forma simplificada as suas diferentes partes (estrutura, balanças de suspensăo, direçăo, transmissăo, etc). Esse procedimento visa reduzir a complexidade da representaçăo gráfica do modelo de multi-corpos, refletindo no seu posterior tempo de processamento. Cada parte mencionada anteriormente, foi transferida separadamente do CAD para o programa Adams utilizando-se o padrăo IGES definida pela ANSI - versăo 11.
No programa Adams, alguns parâmetros săo de fundamental importância para garantir a fidelidade do modelo. Săo eles: 1) Critérios para a definiçăo dos graus de liberdade, 2) Momentos de inércia, 3) Centróides, 4) Rigidez e 5) Amortecimento.
Cada peça possui diferentes valores para os parâmetros citados acima. Alguns deles foram determinados diretamente pelo programa CAD (1,2,3) e os outros (4,5), experimentalmente.
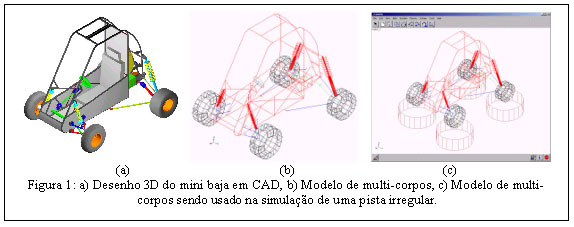
Em cada componente do modelo de multi-corpos foram definidos referenciais locais e introduziram-se os seus graus de liberdade, a posiçăo e orientaçăo das buchas e juntas, dos pneus, etc. A Figura 1a ilustra o desenho 3D do veículo e a Figura 1b, o modelo de multi-corpos criado no Adams.
Durante a etapa de simulaçăo, optou-se por analisar o veículo percorrendo uma pista irregular a uma velocidade constante conhecida (20km/h) em trajetória retilínea e tendo apenas 3 graus de liberdade na estrutura (Rotaçăo em x e em y e translaçăo em z). A figura 1c ilustra o modelo e a forma que se utilizou para representar a excitaçăo proveniente da pista.
Ao fim das simulaçőes e de alguns ensaios numéricos visando avaliar a confiabilidade do modelo partiu-se para a otimizaçăo. Nesta etapa, é de fundamental importância a definiçăo de tręs itens: A funçăo Objetivo, as Variáveis de Projeto e as Restriçőes dessas variáveis.
A funçăo objetivo foi definida como sendo o somatório das aceleraçőes verticais (eixo z) nos pontos de ancoragem das molas na estrutura. Esta formulaçăo visa representar o conforto do veículo.

As variáveis de projeto foram V1: Amortecimento Dianteiro (Compressăo), V2: Amortecimento Traseiro (Compressăo), V3: Rigidez da Mola Dianteira, V4: Rigidez da Mola Traseira, V5: Amortecimento Dianteiro (Traçăo) e V6: Amortecimento Dianteiro (Traçăo).
A superfície de segundo grau obtida está representada abaixo.

Ela foi determinada utilizando um Planejamento Composto Central (PCC) com o parâmetro a escolhido para que o planejamento fosse ortogonal. Nota-se que as variáveis V2 e V6 năo săo significativas neste espaço de projeto e por isso năo estăo presentes na equaçăo.
Utilizou-se uma matriz ortogonal de Taguchi L25 para validar esta superfície de resposta. A figura 2 mostra os resultados obtidos através do meta-modelo estatístico bem como os resultados do modelo original do veículo.
Pode-se notar que a superfície de resposta previu as tendęncias do espaço de projeto amostrado pelo planejamento ortogonal com um erro máximo de aproximadamente 6%.
Conclui-se portanto que a metodologia apresentada mostrou-se adequada aos objetivos propostos, uma vez que os procedimentos de otimizaçăo aplicados aos modelos empíricos de superfície de resposta forneceram resultados muito próximos aos do modelo original do veículo. O uso de meta-modelos estatísticos levou a uma queda de tempo de processamento de aproximadamente 40% no caso analisado. Isto mostra que as técnicas estatísticas usadas com a finalidade de estudar modelos físicos complexos e năo lineares se afirma cada vez mais como uma poderosa ferramenta de análise.
REFERĘNCIAS BIBLIOGRÁFICAS:
Borges, J.A.F.; Dinâmica de Veículos Articulados: Simulaçăo Computacional, Otimizaçăo e Ensaios Experimentais; Tese de Doutorado; Universidade Federal de Uberlândia; Maio 1999.
Simpsom, T.W., Mauery, T.M.; Comparison of Response Surface and Kriging Models for Multidisciplinary Design Optimization; American Institute of Aeronautics and Astronautics Paper AIAA-98-4755.