DESENVOLVIMENTO DE UM SISTEMA AUTOMATIZADO PARA INSPEÇĂO DE CASCO DE NAVIOS DO TIPO FPSO
R. C. S. Suita(1), A. A. Carvalho(2), I. C. Silva(2), J. M. A. Rebello(2)
(1) Departamento de Engenharia Mecânica; (2) Departamento de Engenharia Metalúrgica
LABOEND/COPPE/UFRJ
Centro de Tecnologia, Bloco I, Sala 243,Cidade Universitária, Ilha do Fundăo, 21945-000 Rio de Janeiro, RJ, Brasil, Fone/Fax: (021) 260.3549, e-mail: alves@metalmat .ufrj.br
Palavras chave: END, Ultra-som, Automaçăo.
RESUMO
O desenvolvimento de campos produtores situados em águas profundas da Bacia de Campos se baseia, em grande parte, na utilizaçăo de navios de processamento e de estocagem temporária de petróleo, mais conhecidos pela sigla FPSO. Um dos pontos críticos na operaçăo destes navios convertidos é a integridade do seu casco e de seus tanques de armazenamento, por se tratarem de navios de cascos simples. As sociedades classificadoras determinam uma inspeçăo periódica completa em todos os tanques, o que implica em custos elevados devido a paralisaçăo da produçăo para limpeza, preparaçăo e inspeçăo. Por outro lado, em termos de meio ambiente, as conseqüęncias de um vazamento nestes navios poderiam ser catastróficas, considerando-se também os custos envolvidos, tanto devidos a multas e indenizaçőes, quanto em relaçăo ŕ imagem da empresa.
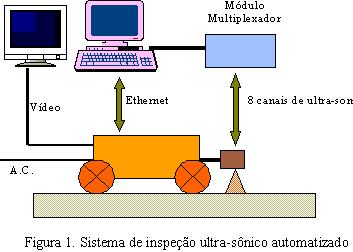
Esse artigo apresenta os resultados de um trabalho que vem sendo desenvolvido pelo Laboratório de Ensaios Năo Destrutivos da COPPE/UFRJ (LABOEND) com o objetivo de fazer a avaliaçăo dos cascos dessas embarcaçőes utilizando um sistema automatizado de inspeçăo por ultra-som sem interrupçăo no processo produtivo. O sistema é composto de um veículo de inspeçăo ao qual será acoplado um módulo multiplexador composto de oito canais ultra-sônicos, podendo trabalhar no modo pulso/eco ou no modo transmissăo/recepçăo. Um micro computador equipado com placa de ultra-som faz o controle de digitalizaçăo e processamento dos sinais e um programa controla esse sistema. Um controlador, no interior do veículo, é responsável pelo controle de trajetória e localizaçăo do veículo (figura 1).
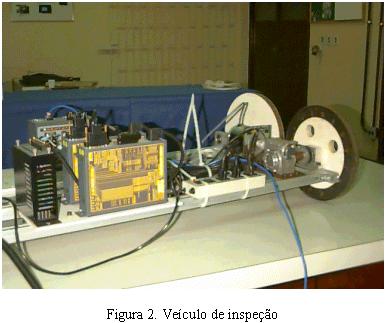
O veículo de inspeçăo terá a funçăo de transportar os transdutores ao longo do casco. Os quais se destinam a monitoraçăo de perda de espessura por corrosăo. O deslocamento do veículo é feito pelo acionamento de 2 motores de passo, cada um responsável pela movimentaçăo das rodas dos lados esquerdo e direito respectivamente. As rodas săo magnetizadas para garantir a aderęncia no casco. A mudança de trajetória é feita alterando a velocidade ou o sentido de rotaçăo de cada motor. Os comandos de acionamento săo enviados de micro computador para um controlador via placa de rede (padrăo ethernet), que encarregará de fornecer os pulsos para acionamento dos 'drivers' dos motores . O controlador possui também 150-K de memória RAM , entrada para 'encoders' e IO'S que podem ser utilizados para sensores ou acionamento de dispositivos .O sistema de acionamento do veículo é composto da seguintes partes (figura 2):
Agradecimentos:
REFERĘNCIAS BIBLIOGRÁFICAS: