DETERMINAÇĂO DE VARIÁVEIS DE PRÉ-PROJETO DE UM ROBÔ POR MEIOS COMPUTACIONAIS
F. Pretti, M. H. Mathias
Departamento de Mecânica, Faculdade de Engenharia, Campus de Guaratinguetá, Universidade Estadual Paulista "Júlio de Mesquita Filho", Av. Dr. Ariberto Pereira da Cunha, 333, Bloco II, Guaratinguetá, SP, CEP: 12.500-000.
Palavras chaves: Robótica, projeto, modelagem de mecanismos.
RESUMO
Este trabalho trata da parte inicial do projeto de um braço de robô cuja anatomia e dimensőes foram previamente escolhidas. O objetivo aqui é determinar as variáveis de pré-projeto do braço, ou seja, as variáveis cinemáticas, tais como posiçăo, velocidade e aceleraçăo dos seus componentes (eixos).
A anatomia escolhida para o robô foi a do tipo Braço Articulado Vertical abaixo esquematizado, que consiste em um braço dotado de seis movimentos de rotaçăo.
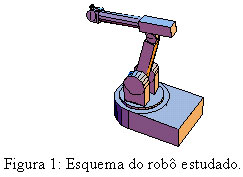
Esta configuraçăo é largamente utilizada em serviços gerais na indústria, por sua versatilidade e capacidade de movimentacao rápida e precisa. Exemplos de aplicaçăo săo operaçőes de soldagem, montagem e manipulacao de ferramentas e de materiais.
A etapa seguinte foi determinar as dimensőes do braço bem como a amplitude dos movimentos de rotaçăo dos eixos do robô. Determinados esses parâmetros pôde-se entăo dar início ŕ determinaçăo das variáveis cinemáticas, o que foi executado computacionalmente através do Toolbox Mechanical Systems Pack do Software Mathematica.
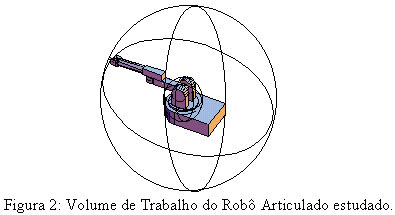
A determinaçăo das posiçőes atingíveis pelo robô é de grande importância para a avaliaçăo do seu volume de trabalho, que tem papel fundamental no planejamento da sua aplicaçăo na linha de produçăo em que vai ser empregado, bem como na disposiçăo de seus periféricos e da peça a ser por ele trabalhada.
Para a determinaçăo do volume de trabalho foram analisadas as situaçőes extremas de distensăo e retraçăo dos eixos do robô em separado, levando-se em consideracao as amplitudes de movimento acima mensionadas, gerando perfis de alcance de todos os eixos, que sobrepostos determinam o volume de trabalho total do equipamento, que é representado esquematicamente na Figura 2.
A determinaçăo das velocidades resultantes de cada um dos eixos do robô devido ŕs velocidades finais do punho (porta-ferramenta) geradas pelo programa săo de extrema importância, pois segundo Groover (1988) a estabilidade e a precisăo do posicionamento do punho é inversamente proporcional ŕ sua velocidade. Deste modo é importante determinar um valor limite para a velocidade de movimento de todos os eixos, para que no momento da programaçăo sejam impostos tais limites, de modo a garantir determinadas precisăo e estabilidade.
Com o auxílio do software acima citado, foi entăo gerado um programa a ser utilizado na fase de programaçăo do robô, no qual a partir de velocidades desejadas para o punho obtém-se os valores das velocidades individuais - tanto de rotaçăo quanto de translaçăo - de cada um dos eixos, de modo a possibilitar uma estimativa da precisăo. Além disso, poder-se-á ainda determinar qual será o valor do amortecimento necessário para manter-se uma boa estabilidade de posicionamento, reduzindo as variaçőes de posiçăo a um valor aceitável.
Por fim, de modo análogo, foi gerado um programa também para a determinaçăo da aceleraçăo de cada eixo devido aos movimento do punho. A importância deste fator está na determinaçăo dos carregamentos dinâmicos do robô, bem como na determinaçăo de valores limite para a frenagem dos movimentos, de modo a prever-se esforços dinâmicos muito elevados, os quais poderiam levar ŕ perda de precisăo do braço devido a deformaçőes da estrutura do robô, que por ser um braço didático năo possuirá estrutura robusta, sendo assim, suscetível a deformaçőes mesmo quando sujeito ŕ pequenas cargas.
Deste modo, deixa-se, em nível de pré-projeto, ŕ disposiçăo para os passos seguintes da concepçăo do braço, fatores como as posiçőes, velocidades e aceleraçőes dos eixos do robô, de importância já mencionadas, possibilitando o dimensionamento da estrutura do robô, bem como a seleçăo dos atuadores - servo-motores ou motores de passo - e de componentes como freios e sensores.
Agradecimentos: Os autores agradecem ao Departamento de Mecânica da Faculdade de Engenharia de Guaratinguetá pelo apoio técnico-científico e ŕ Unesp, Campus de Guaratinguetá pelo apoio financeiro.
REFERĘNCIAS BIBLIOGRÁFICAS:
Groover, M.P., Weiss, M., Nagel, R.N., Odrey, N.G.- Robótica, McGraw-Hill, Săo Paulo, 1988.
Craig, J.J. - Introduction to Robotics - Mechanics and Control, 2nd edition, Addison-Wesley, 1989.
Salant, M.A. - Introduçăo ŕ Robótica, Makron Books, Săo Paulo, 1990.
Mechanical Systems Pack - User's Guide, Wolfram Research Inc,Champaign,1995.