PROJETO DE UM ATUADOR EM LIGAS Ni-Ti COM EFEITO MEMÓRIA DE FORMA (Músculos Artificiais)
C.E.G. Catunda(1), M.S. Dutra(1), C.G. Ferreira(2), R.F. de Moraes(2)
( 1 ) Departamento de Engenharia Mecânica; ( 2 ) Departamento de Engenharia Eletrônica.
Escola de Engenharia, Universidade Federal do Rio de Janeiro, Laboratório de Automaçăo e Robótica, Cidade Universitária Bl: G, sala 204 - Centro de Tecnologia, CEP: 21945-970 - Rio de Janeiro - RJ.
Palavras chaves: Memória de Forma, Músculo Artificial, Robótica, Biomecânica.
RESUMO
Na busca de novas técnicas e métodos para o aprimoramento dos atuadores mecânicos convencionais, surgiu a proposta para o projeto em questăo. A equipe de Projeto de Máquinas/Robótica está executando o projeto de um atuador mecânico totalmente orientado no princípio de acionamento das ligas com memória de forma (Shape Memory Alloy - SMA). Materiais com memória de forma săo ligas capazes de recuperar a sua forma primitiva depois de submetidas a deformaçőes de qualquer natureza. O foco principal deste estudo está na verificaçăo e na viabilidade do emprego deste novo modelo de atuaçăo, aqui preconizado, como atuador mecânico em diferentes sistemas.
O estudo deste tipo de materiais começou em 1932, quando observou-se a capacidade de uma liga de ouro-cádmio de recuperar sua forma primitiva e se verificou o potencial desta para criar movimento. Mais tarde, outros estudos indicaram a mesmas propriedades em outras ligas metálicas tais como: índio-titânio, níquel-titânio, cobre-alumínio, cobre-zinco, cobre-alumínio-níquel, dentre outras. A descoberta do níquel e titânio (objeto deste estudo) como materiais formadores da liga de memória de forma utilizada hoje, foi por acaso. Enquanto pesquisava materiais năo corrosivos um grupo de pesquisa da marinha dos USA (U.S. Naval Ordinance Laboratory) observou o efeito de memória de forma em uma liga de Ni-Ti, denominando esta de NITINOL ou Músculo Artificial.
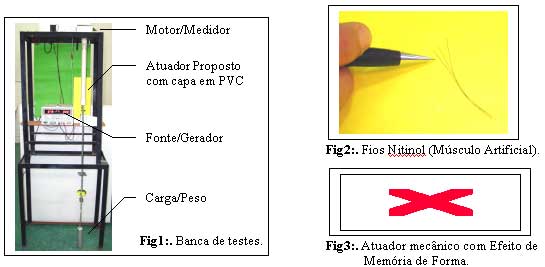
Foram realizados testes com 1 e com 3 fios de nitinol, denominados neste trabalho como Músculos Artificiais, de diâmetro 0,150mm. O músculo artificial quando submetido a temperaturas abaixo da temperatura de ativaçăo, pode ser facilmente distendido pela chamada força de recuperaçăo, isto é, a força necessária para o fio voltar a posiçăo de maior comprimento. Quando aquecido ŕ temperatura de ativaçăo, em nosso caso, aproximadamente 90°C, ele exerce uma força que pode chegar a 40 vezes o peso de recuperaçăo. O ciclo típico, isto é, o número de ciclos (aquece/resfria) é uma das características mais importantes num músculo artificial. Este valor nos permite saber se o movimento pode ser rápido o suficiente para uma determinada tarefa. O fio contrai logo que é aquecido e retorna a sua forma relaxada quando é resfriado. O procedimento adotado neste experimento foi o aquecimento do material através de picos de corrente elétrica até a temperatura de ativaçăo e o resfriamento ficou a cargo da convecçăo livre para o ambiente (aproximadamente 24°C). A corrente de ativaçăo depende de fatores como diâmetro, comprimento e condiçőes do meio ambiente. Na Tabela_1, vęem-se valores de corrente e taxa de ciclos de operaçăo para diferentes diâmetros ŕ temperatura ambiente e imerso em ar. Utilizando este tipo de atuador, pode-se projetar um equipamento sensivelmente mais leve e flexível.
Os fios de nitinol foram ensaiados até a ruptura por ensaios de repetibilidade. As configuraçőes de 1 fio e de 3 fios, apresentaram o número de ciclos superiores a 10000 e 4600, respectivamente. O grau de contraçăo máximo do material foi de 5% do seu comprimento primitivo.
Podemos concluir que, comparados com outros atuadores, como por exemplo: solenóides e motores elétricos, os materiais com memória de forma apresentam muitas vantagens. Para mesma potęncia podemos destacar as seguintes vantagens: menor tamanho; menor peso; necessidade de baixa potęncia para ativaçăo; maior relaçăo força/peso; ativaçăo elétrica através de corrente contínua ou alternada; açăo linear direta; grande flexibilidade de uso; năo permite a entrada de água em seu interior; boa resistęncia ŕ corrosăo; e controle preciso e silencioso. As desvantagens do material săo: a baixa contraçăo, a dificuldade de manuseio e a complexidade do sistema de controle. Os testes com os fios de nitinol mostraram-se satisfatórios e sua utilizaçăo apresenta-se como uma alternativa viável para atuaçăo mecânica.
Agradecimentos: Ao CNPq e FAPERJ pelo apoio científico e sustentaçăo ao projeto.
REFERĘNCIAS BIBLIOGRÁFICAS:
[1] COSTA NETTO, S.M. da; 2001; "Estudo e Projeto de um Robô Hexápode com Atuadores Utilizando Material com Efeito Memória de Forma", dissertaçăo M.Sc., UFRJ, Brasil.
[2] NAKA, M.H.; 2001; "Estudo e Projeto de uma Măo Mecânica com Cinco Dedos com Atuadores Utilizando Material com Memória de Forma",dissertaçăo M. Sc., UFRJ, Brasil.
[3] PALEROSI, A.C.; 1999; Projeto de um Dispositivo de Liberaçăo/Retençăo com Atuador em Liga com Efeito de Memória de Forma para Paineis Solares do Satélite Científico SACI-I; In: XV COBEM, Águas de Lindóia (SP), Brasil.